
Transmission monitoring
The chain between motor and load. Where most failures hide.
Belts, gearboxes, couplings. The transmission is rarely instrumented because the motor is what trips and the load is what stops working. Performance varies materially by transmission type, so this page reports per-fault evidence rather than a pooled headline. Belt drives are ESA's strongest transmission application; multi-stage and planetary gearboxes are conditional and we say so.
SAM4 reads the motor current at the MCC and watches the drivetrain in between. A third of mechanical failures actually start there.
The most diverse failure landscape in any drivetrain
Transmissions span the widest range of mechanical configurations in industrial systems. Each type has its own dominant failure modes, signal characteristics, and monitoring blind spots. Treating them as one category leads to missed faults and false confidence.
of gearbox failures originate in bearings, not gears. Lubrication inefficiency is the root cause in over 60% of those bearing failures. (NREL Gearbox Reliability Database, 750 records)
of machine wear is particle-induced. Contamination particles as small as 5 µm act as abrasives inside gearboxes and bearings. Oil cleanliness determines gear life more than load does.
of transmission, belt drives, single-stage gearboxes, multi-stage gearboxes, planetary gearboxes, chain drives, and couplings, each with fundamentally different failure physics and monitoring requirements.
The motor as transducer: reading mechanical faults through electrical current
Any mechanical event that modulates the torque seen by the motor creates sidebands in the stator current spectrum. The motor converts torque fluctuations into speed fluctuations, which change the back-EMF, which modulate the current. ESA reads these modulations from the motor control cabinet.
Motor inertia as low-pass filter
The motor rotor’s moment of inertia determines the mechanical bandwidth. High-frequency torque fluctuations are smoothed before they reach the electrical signature. Low-frequency fluctuations pass through. This single physics principle explains why ESA detects some transmission faults and misses others.
Belt-pass frequency: ESA’s sweet spot
Belt faults produce torque modulation at the belt-pass frequency, which is always sub-synchronous, below motor running speed. This sits well below the motor inertia cutoff and transmits efficiently through the motor with minimal attenuation, regardless of motor size. Belt drives are ESA’s strongest transmission application. (IEEE 2022, MDPI 2023, peer-reviewed)
Gear mesh frequency: motor-size dependent
Gear mesh frequency = teeth × shaft RPM. For most gearboxes, this is super-synchronous. Motor inertia attenuates it. Detection proven at 30 kW (Combet 2015), fails at 2 MW. Practical limit: motors ≤200 kW with single-stage gearboxes where mesh frequency stays below ~200 Hz.
Representative SAM4 dashboard view. The cabinet read produces fault classifications with evidence levels and recommended actions. On transmissions, the same workflow runs against load-path signatures: a belt-pass-frequency drift, a coupling 2x harmonic, or a gear-mesh sideband flags as an anomaly, gets reviewed against asset history, and routes to a recommended action.
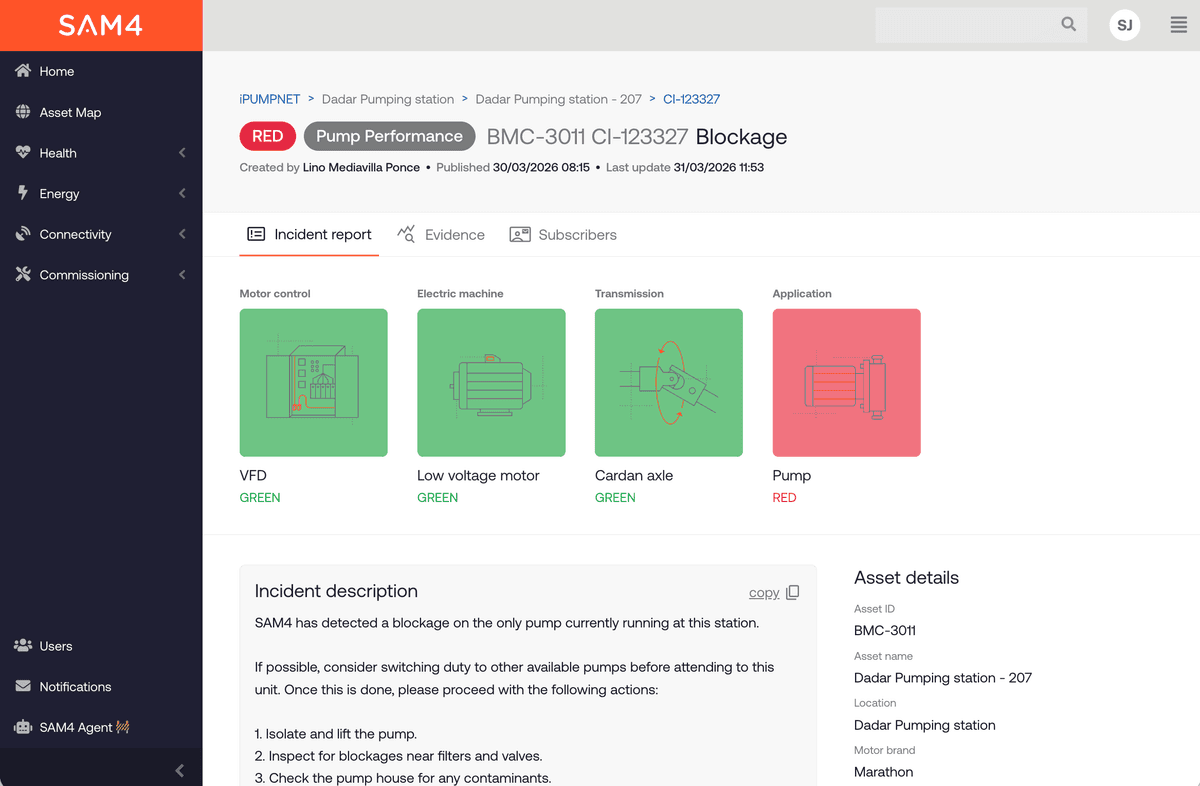
Signal flagged
Expert review
Fault classified
Action recommended
What SAM4 detects on transmissions, by fault mode
Performance varies materially by transmission type. Belt drives are ESA's strongest application. Multi-stage and planetary gearboxes are conditional and may trend rather than diagnose. This page reports per-fault evidence and avoids a pooled headline. Maturity bands: Proven (≥95% recall on adequate sample), Effective (85 to 94%), Developing (65 to 84%), Early-stage (<65%). For samples below 50 cases, counts are shown rather than percentages.
Capability by transmission type
- V-belts and timing belts: Strongest. Belt slip, pulley misalignment, and tension loss modulate torque in narrow, characteristic bands.
- Chain drives: Strong. Chain stretch, pin wear, and sprocket fatigue produce distinctive harmonic families.
- Single-stage gearboxes: Good. Gear mesh frequency and sidebands are clearly observable in the current spectrum.
- Multi-stage and planetary gearboxes: Conditional. Detection attenuates with each reduction stage. Often trends rather than diagnoses.
- Direct couplings: Good. Misalignment and coupling wear show at 2x running speed.
- Fluid couplings and torque converters: Limited. The hydraulic element decouples mechanical signatures.
| Fault | Drivetrain element | Maturity | Evidence note |
|---|---|---|---|
| Belt degradation | Belt drive | Proven | Strongest pathway. Resolved on cross-asset cohorts including the centrifugal, conveyor, and Archimedes hosts, where belt-pass frequency is reliably observable. |
| Belt tension drift | Belt drive | Proven | Detected through belt-pass frequency drift. Monitored continuously between scheduled tension checks. |
| Pulley misalignment | Belt drive | Proven | Belt-misalignment detections resolved across deployments. Strongest transmission signal at the MCC. |
| Coupling unbalance | Coupling | Effective | Above 85% recall on the small reviewed sample. Trended through 1x and 2x running-speed signatures. |
| Coupling misalignment | Coupling | Developing | Small reviewed sample. Pathway resolved on cross-asset cohorts. ESA detects modulation; vibration phase analysis discriminates root cause. |
| Gear mesh wear (single-stage) | Gearbox | Effective | Pathway resolved on small samples. Single-stage only. Sample size still building. |
| Gear mesh wear (multi-stage) | Gearbox | Developing | Detection attenuates with each reduction stage. Trends rather than diagnoses individual components. |
| Gearbox bearing wear | Gearbox | Developing | Vibration envelope analysis is primary. Multi-stage attenuation thins the signal. |
| Gear tooth fracture (early) | Gearbox | Developing | Detected via sideband modulation. Sample size limited. Vibration TSA provides earlier indication. |
| Lubrication degradation | Gearbox | Early-stage | Indirect via efficiency drift. Oil analysis remains the primary indicator for lubricant condition. |
| Mechanical unbalance (motor) | Motor | Proven | Pathway resolved across cohorts. 1x running-speed signature. |
| Process load anomalies | Driven machine | Effective | Sustained load shifts and operating-point drift. Above 85% recall on the cross-asset cohort. |
Sources: SAM4 Failure Mode Analysis register, peer-reviewed ESA literature (IEEE 2022, MDPI 2023, Combet 2015), and confirmed field outcomes across active deployments. See full detection transparency report.
Per-fault evidence on transmissions
Performance varies materially by transmission type and fault mode. We do not lead with a pooled headline. Belt drives are ESA's strongest transmission application; multi-stage gearboxes are conditional; chain drives and fluid couplings sit outside the envelope.
Cohort and window
- Cohort: 30+ scored transmission cases in the current 12-month review window. Belt-drive proof is reinforced by larger cross-asset cohorts on the fans & blowers and conveyors pages.
- Window: April 2025 to April 2026.
- Evidence type: Fault-mode evidence. Recall on confirmed fault events is shown by pathway. Pooled averages are not published because they would mask the difference between belt drives (strong) and deep-stage gearboxes (conditional).
- Boundary: deep multi-stage gear and bearing faults, fluid couplings, chain-drive harmonics filtered by motor inertia, and oil-condition diagnostics sit outside the direct ESA envelope.
Best-supported pathways
- Belt degradation, tension drift, pulley misalignment. Sub-synchronous belt-pass frequency passes through motor inertia at any motor size. Strongest pathway on the page.
- Coupling unbalance and wear. 1x and 2x running-speed signatures.
- Single-stage gear mesh on motors below 200 kW. Mesh frequency stays below the inertia cutoff.
- Process load anomalies. Sustained shifts reach the current as torque change.
Conditional pathways
- Multi-stage gearbox internals. Detection attenuates with each reduction stage. Trends rather than diagnoses individual components.
- Coupling misalignment. Pathway resolved on cross-asset cohorts; vibration phase analysis discriminates root cause.
- Gearbox bearing wear. Vibration envelope analysis is primary; ESA adds load-side trending.
- Gear tooth damage on downstream stages. Vibration TSA provides earlier indication.
Outside the claim
- Fluid couplings and torque converters. The hydraulic element decouples mechanical signatures.
- Chain drives. Super-synchronous frequencies filtered by motor inertia. No published MCSA research base.
- Lubricant condition, contamination, wear particles. Use oil analysis.
- Gear wear severity to ISO 10825. Use vibration TSA.
- Motors above 500 kW. Only sub-synchronous frequencies pass through inertia.
Why this page reports per-fault evidence rather than a pooled %
Transmissions span six fundamentally different mechanical configurations. Belt-pass frequency on a V-belt sits at the bottom of the spectrum, well inside motor-inertia bandwidth. Gear mesh on a multi-stage helical gearbox sits at the top of the spectrum, often outside it. A pooled average would average those two physical regimes and mislead the reader about either one.
The disclosure principle applied here: where performance varies materially by configuration or fault mode, publish per-pathway evidence rather than a pooled headline.
ESA, vibration, and oil analysis: three technologies, distinct roles
Transmissions are the asset type where ESA and vibration have the most distinct roles: and where oil analysis fills gaps neither technology reaches. Each method sees different fault types first. The monitoring question is coverage, not competition.
ESA leads
- Belt slip, wear, tension loss, and misalignment (sub-synchronous, all motor sizes)
- Motor electrical faults: stator winding, rotor bar, supply quality
- Load anomalies, overload trending, efficiency loss
- Fleet-scale screening from MCC: no per-unit sensor cost
Both contribute
- Gear tooth damage (vibration detects earlier; ESA confirms torque impact)
- Coupling misalignment (ESA detects modulation; vibration provides phase-based root cause)
- Overall drivetrain degradation: ESA sees load changes, vibration sees structural changes
Vibration + oil analysis lead
- Gearbox bearing faults: 76% of all gearbox failures (envelope analysis at Stage 1–2)
- Early localised tooth damage: pitting, micro-cracking (TSA)
- Intermediate/output stage faults in multi-stage gearboxes
- Oil contamination, degradation, progressive wear (oil analysis detects 15× earlier)
- All faults downstream of fluid couplings
Optimal monitoring architecture by transmission type
The right monitoring stack depends on the transmission type. For belt drives, ESA is primary. For multi-stage and planetary gearboxes, vibration and oil analysis are primary. ESA fills gaps on the assets that would otherwise go unmonitored.
| Transmission type | ESA role | Primary limitation | Best combined approach |
|---|---|---|---|
| Belt drives | Primary. Belt-pass frequency, wear, tension, alignment, fleet-wide from MCC. | Sheave groove wear has lower specificity. | ESA for fleet monitoring. Periodic laser alignment + tension measurement on critical units. |
| Single-stage gearboxes | Co-primary (≤200 kW). Motor health, load trending, first-stage gear/bearing. | Motor inertia filters gear mesh on larger motors. Proven at 30 kW, fails at 2 MW. | ESA + vibration. Oil analysis monthly–quarterly on critical units. |
| Multi-stage gearboxes | Secondary. Motor health, efficiency trending, misalignment only. | Cannot isolate gear stage. Bearings (76% of failures) not reliably visible. | Vibration (TSA + envelope) primary. Oil analysis for progressive wear. ESA for motor condition. |
| Planetary gearboxes | Tertiary. Motor health and gross load trending only. | Complex distributed load paths. Planet bearing failures invisible to ESA. | Vibration + oil analysis essential. ESA adds motor electrical monitoring only. |
| Couplings (mechanical) | Complementary. Misalignment is a strong ESA application. | Cannot distinguish misalignment from unbalance. Fluid couplings: hard boundary. | Vibration for root-cause discrimination. ESA for trending and confirmation. |
| Chain drives | Not recommended. Evidence insufficient. | No published MCSA research. Super-synchronous frequencies filtered by motor inertia. | Visual inspection + elongation measurement. Vibration on critical units. |
Architecture recommendations based on Combet (2015), NREL Gearbox Reliability Database (750 records), Monash University oil analysis research, ISO 10816/13373, and SAM4 field deployment data.
ESA expands the monitored population, not the diagnostic ceiling
The strongest argument for ESA on transmissions is not diagnostic superiority: it is deployability at scale. Comprehensive vibration monitoring on a three-stage gearbox requires 12–16 accelerometers. Oil analysis requires sampling logistics and lab turnaround. ESA requires one sensor set at the MCC.
For a facility with 50–100 belt-driven or geared assets, ESA brings continuous condition data to enclosed gearbox packages, hazardous-area equipment, and belt-driven fleet assets that would otherwise go unmonitored. For critical multi-stage gearboxes, it complements but does not replace vibration and oil analysis. For belt-driven equipment fleets, it offers the best cost-to-coverage ratio of any single technology.
On complex gearboxes where ESA sensitivity is limited, detecting an anomaly still beats discovering a failure. Classification can follow from inspection.
What SAM4 detects on transmissions, and what it does not.
ESA reads the motor's electrical signal at the MCC. Torque modulations propagate back through the transmission as current sidebands. Each reduction stage attenuates the signature. Faults that do not change torque, or that sit behind hydraulic or elastomeric decouplers, are outside ESA's physics.
Inside the ESA envelope
- Belt and chain frequency harmonics and their sidebands (sub-synchronous, passes through motor inertia)
- Gear mesh frequency and sidebands on single-stage gearboxes (motor size dependent)
- Pulley, sheave, sprocket misalignment via 1x and 2x running speed shifts
- Coupling wear and misalignment via 2x running speed signature
- Load-side bearing degradation on drive roller or input shaft
- Motor-side electrical faults that affect transmission load behaviour
- Fleet-scale load trending and efficiency monitoring from MCC
Outside the ESA envelope
- Deep multi-stage gearbox faults: late-stage gear or bearing defects attenuate before reaching the motor
- Planetary gearbox planet bearing failures (complex distributed load paths)
- Gear wear severity classification to ISO 10825 levels (requires vibration TSA)
- Lubricant condition, contamination, wear particle analysis (requires oil analysis)
- Gearbox thermal state (requires temperature instrumentation)
- Faults isolated by fluid couplings or torque converters (hydraulic element decouples mechanical signatures)
Real faults caught in transmission systems
Representative detections from transmission monitoring deployments across multiple industries and transmission types.

Loose cardan joint caught the same day SAM4 was installed
Read how SAM4 caught a loose cardan shaft coupling within hours of installation on this long-term steel customer's runout table roll.

Early warning on failing cardan shaft coupling in runout table roller
Read how SAM4 caught a failing cardan shaft coupling in a runout table roll for this steel manufacturer.

Condition monitoring for circulator pumps: a case study
Read how SAM4 caught misalignment between this pump's gearbox and motor 7 months in advance for a chemical customer.
Preventing downtime on belt-driven equipment
Belt-driven pumps, conveyors and fans keep your plant in motion. Whether you are moving, processing or storing your product, there are probably some very
Is SAM4 a fit for your transmission systems?
ESA detects mechanical and electrical faults that modulate motor torque or current. Some configurations sit firmly inside that physics. Others need a closer look. A few are outside the envelope.
Strong fit
- Belt drives (V-belts, timing belts), ESA's strongest transmission application
- Single-stage gearboxes on motors below 200 kW (gear mesh frequency observable)
- Direct couplings (misalignment, wear visible at 2x running speed)
- Motors above 1 kW with shaft speed 450 RPM
- Fleet-wide screening of belt-driven and geared assets from the MCC
- Operators who want continuous load and efficiency trending alongside fault detection
Needs review
- Multi-stage gearboxes (detection attenuates per reduction stage)
- Motors above 200 kW (motor inertia filters gear mesh frequency)
- Planetary gearboxes (complex distributed load paths reduce ESA sensitivity)
- ABB ACS600 and ACS800 medium-voltage VFDs require dedicated engineering assessment
- 2-pole motors above 2,970 RPM (50 Hz) or 3,565 RPM (60 Hz)
Usually not a fit
- Motors above 500 kW (only sub-synchronous frequencies pass through inertia)
- Fluid couplings and torque converters (hydraulic decoupling blocks mechanical signatures)
- Chain drives (no published MCSA research; signals filtered by motor inertia)
- Late-stage gear or bearing defects in deep multi-stage gearboxes
- Lubricant condition, contamination, wear particle analysis (use oil analysis)
- Gear wear severity to ISO 10825 (use vibration TSA)
Under 60 minutes. No transmission access required.
1. Open the motor control cabinet
SAM4 installs at the MCC, the same panel your electricians already access. No access to the gearbox, coupling, or belt drive required. Back online same shift, no process interruption.
2. Clip sensor onto motor supply cables
Current and voltage sensors clip directly onto existing cabling. No wiring changes. No interruption to the transmission’s operation. This is why ESA scales to fleet-size deployments, the same installation covers belts, gearboxes, and couplings in the drivetrain.
3. Connect and commission
The SAM4 gateway connects via cellular (4G/LTE). No dependency on your IT network. Monitoring starts immediately, with first diagnostic results within 48 hours.

Other asset types SAM4 monitors
Fans & blowers
Ventilation fans, cooling fans, process blowers, and aerators.
Conveyors
Belt conveyors, screw conveyors, and chain drives.
Pumps
Centrifugal pumps in water, chemicals, oil & gas, and process industries.
Agitators & mixers
Reactor agitators, tank mixers, and blenders.
See SAM4 monitoring transmissions
A 30-minute demo shows SAM4 running on transmission systems like yours, with real fault data, real diagnostics, and honest detection boundaries.