
Archimedes screw monitoring
Continuous monitoring for remote Archimedes screws, from the MCC
Read the screw drivetrain through the cable that already powers it.
Wastewater inlet works. Storm overflows. Rural pumping stations. Most Archimedes screws sit alone in the field, on a slow gearbox, in a hostile environment. Vibration sensors are difficult to deploy at scale. SCADA reads on/off. ESA reads the rest.
Submerged, slow-turning, and remote
Archimedes screws at wastewater inlet works are the first line of defence against sewage overflow. When they fail, raw sewage bypasses screening and enters rivers or coastal waters. The most expensive failure is the submerged lower bearing, also the hardest to monitor. It sits underwater in abrasive wastewater, inaccessible for inspection, operating at speeds too low for standard vibration analysis. The result is a structural monitoring blind spot.
Submerged lower bearing
The most expensive single failure mode on any screw installation. Replacement requires crane hire, civil works, and weeks of downtime. The bearing sits underwater in abrasive wastewater, inaccessible to inspection and impossible to monitor with vibration.
Below 30 RPM
Screw shaft speeds typically run 20 to 30 RPM after the gearbox. That sits below the bandwidth where vibration analysis resolves bearing faults reliably. The motor side is where the signal lives.
Unmanned between visits
There is no operator on site to hear a belt slipping or a gearbox loading up. SCADA reports run and stop and flow. Everything between those signals goes unobserved until the screw trips or the channel backs up.
Reading the gearbox from the cabinet
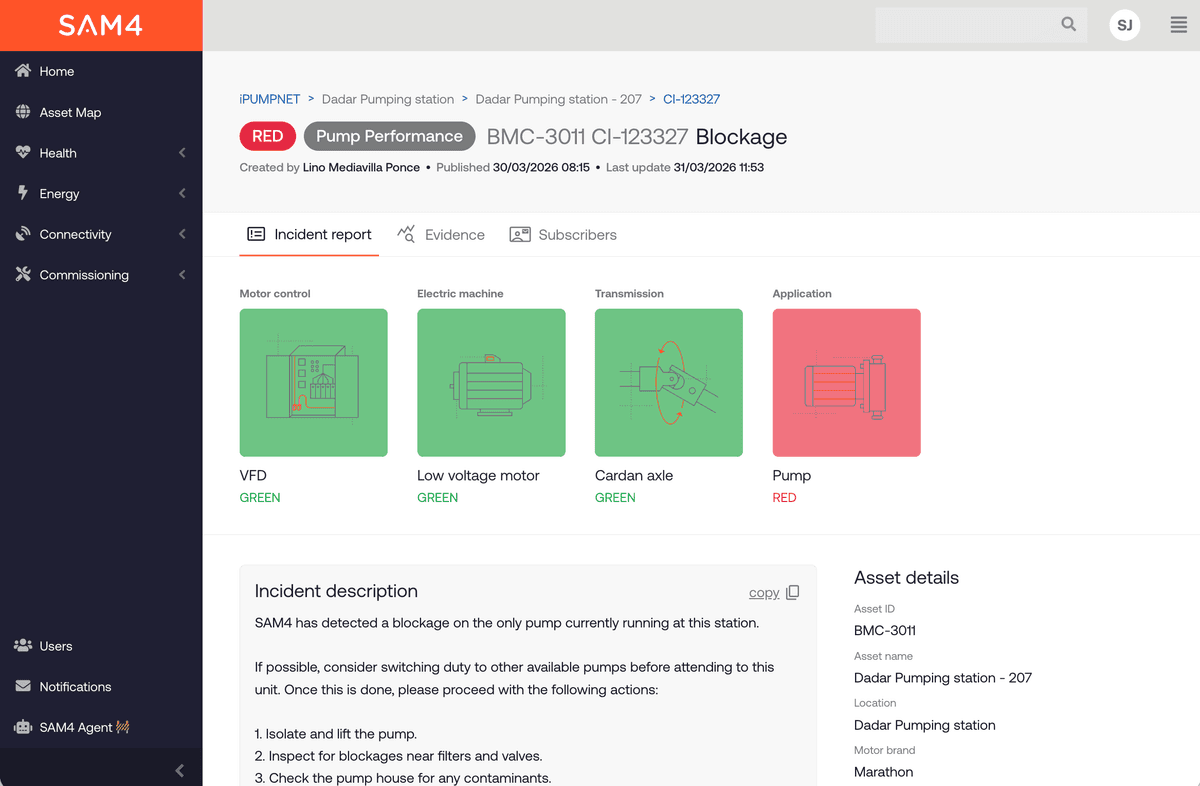
The motor cable already carries the signal. SAM4 reads at the cabinet, classifies the fault, and routes it through expert review before it reaches you.
On Archimedes screws, ESA's strongest evidenced pathway is belt detection. Belt frequency, harmonics, and pulley order resolve clearly in the motor current spectrum at the MCC. In the reviewed cohort, belt degradation was the most common detected fault: four caught, one missed across 12 months. ESA also detects submerged lower-bearing degradation: bearing wear modulates torque, and the signature reaches the motor through the gearbox.
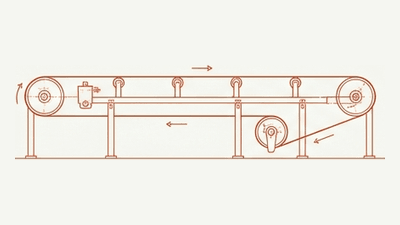
Most Archimedes screws run motor → gearbox → belt → screw on a planetary or worm-drive reducer. ESA reads the motor side at the MCC, where current data is rich at 1,500 RPM. The gearbox amplifies torque modulations from the screw end: a 30:1 reduction multiplies torque ripple by roughly 28 times, which is what makes lower-bearing detection possible from the cabinet. SAM4 reads the three current and three voltage signals at the cabinet, builds a baseline against the asset's normal duty cycle, and flags signature changes for expert review.
For Archimedes screws, this is a practical continuous monitoring path at fleet scale. The asset is remote. Vibration sensors are difficult to deploy reliably in the wet environment and require site visits to commission. The cable is already there, kilometres from the asset.
Representative SAM4 dashboard view. The cabinet read produces fault classifications with evidence levels and recommended actions. On Archimedes screws, the same workflow runs against load signatures propagating through the gearbox.
Signal flagged
Expert review
Fault classified
Action recommended
What SAM4 detects on this asset, and where it doesn't fit
One table. Each fault class appears once with its signal path, the strength of field evidence on this asset class, and the recommended use of SAM4. Most Archimedes screws run motor → gearbox → screw, often with a belt drive between motor and gearbox. ESA reads the drivetrain through the cable that powers it. Field evidence drawn from 12 reviewed cases over the 12 months ending 2026-05-01.
| Fault class | Signal path | Field evidence on this asset | Use SAM4 as |
|---|---|---|---|
| Phase loss and voltage imbalance | Direct / electrical. Resolved at the cabinet from current and voltage symmetry. | Pathway established across motor-driven assets. | Primary monitoring |
| Process-induced load deviation | Load signature. Debris, blockage, ragging, and level changes reach the current as torque change. | Detected consistently across the cohort. | Primary monitoring |
| Mechanical unbalance | Load signature + 1x running speed. Reaches motor current through the rotor. | Small sample reviewed. Detected consistently despite slow shaft speed. | Primary monitoring |
| Bearing degradation (lower, submerged) | Indirect electromagnetic + load. Signature propagates from the submerged bearing through the screw shaft and gearbox to the motor current. Gearbox reduction amplifies torque modulations from the screw end. | Detected on Archimedes screws in reviewed cases. Cabinet-side read picks up the bearing signature at established stages. Pair with upstream condition monitoring (misalignment, overload, gearbox stress) for earlier warning. | Conditional |
| Gearbox degradation or gear-mesh anomaly | Output-shaft signatures coupled to the motor. Most Archimedes screws run on slow-speed, high-torque gearboxes. | Cases reviewed. Pathway established across asset classes. | Conditional |
| Belt degradation | Transmission path + belt-pass frequency. Belt-driven motor-to-gearbox configurations are common. | Pathway established. Cross-asset proof on belt drives. | Conditional |
| Coupling-related load anomaly | Load signature + 1x. | Small sample reviewed. No misses observed. | Conditional |
| Shaft or coupling misalignment | Load signature + 2x. | Small sample reviewed. Vibration phase analysis discriminates root cause. | Conditional |
| Stator winding short indicators | Direct / electrical. | Pathway established across asset classes. Screw-specific cohort still building. | Conditional |
| Rotor bar degradation | Indirect electromagnetic. | Pathway established across asset classes. Screw-specific cohort still building. | Conditional |
| Soft foot indicators | Distinctive base-mounting signature in the current. | Small sample reviewed. | Conditional |
| Bearing degradation (upper, drive-end) | Indirect electromagnetic + load. Visible once degradation reaches the motor current. | Stable runtime helps; intermittent duty thins the signal. Vibration on accessible drive-end bearings remains the better tool for raceway-level diagnosis. | Late-stage detection |
Outside the envelope: Trough wear and flight degradation: Use periodic visual inspection or thickness gauging. Submerged lower bearing severity grading: Use submersible vibration or replace on schedule for the most critical assets.
Where ESA fits in your monitoring architecture
Most Archimedes screws have no continuous health monitoring. ESA fills that gap. It runs alongside what's already in place, not in place of it.
Process layer
SCADA on flow, level, run status, and kWh. Process control on starters and VFDs. These tell you when the screw stops or trips. They don't tell you that a belt is degrading or a gearbox is loading up.
Asset-health layer
Continuous monitoring on every screw, read from the motor control cabinet, kilometres from the asset. Belt and gearbox signatures resolve at the motor side. Each detection passes through expert review and arrives with an evidence tier showing the strength of the supporting field evidence. No site visit. No extra sensors on the asset.
Specialised layer
Lower-bearing seal condition under late-stage failure (use periodic dewatering). Gearbox oil condition (use oil analysis). Flight weld integrity and corrosion (use visual inspection or NDT). Concrete channel damage. These sit outside what the cabinet read can resolve.
For critical installations, layer ESA with quarterly oil sampling on the gearbox and annual visual or NDT inspection on the flights. ESA becomes the continuous baseline; inspection provides the structural confirmation.
Real detections on Archimedes screws
Representative detections from water utility deployments. Each follows the same evidence chain: signal flagged, fault hypothesised, action recommended, customer inspection, outcome confirmed.

Preventing failure in wastewater inlet screws
Preventing failures in wastewater inlet screws holds significant importance on the agenda for water companies as it helps avert breakdowns and pollution events.

Two pollution events prevented and €840k saved on repairs and emergency mitigation
Early belt degradation is typically difficult to spot through vibration measurements and manual inspections. But not for SAM4 Health, which helped a water
Wastewater inlet station energy cost reduced by €42k per year
Two screw pumps operated at less than a third of their nominal power. SAM4 Energy determined that a single screw pump could easily handle all the flow during
Under 60 minutes. No screw access required
1. Open the motor control cabinet
SAM4 installs at the MCC, the same panel your electricians already access. No confined-space entry. No site visit to the screw itself. Critical for remote pumping stations where access is limited.
2. Clip sensors onto motor supply cables
Current and voltage sensors clip directly onto existing motor cabling. Installation requires a brief motor de-energisation while sensors are fitted, typically scheduled with operations. Works with DOL starters, soft starters, and VFD-driven screws.
3. Connect and commission
The SAM4 gateway connects via cellular (4G/LTE). No dependency on site IT or SCADA networks. Monitoring starts immediately. First diagnostic results within 48 hours.

Other asset types SAM4 monitors
Pumps
Centrifugal pumps in water, chemicals, oil & gas, and process industries.
Fans & blowers
Ventilation fans, cooling fans, process blowers, and aerators.
Conveyors
Belt conveyors, screw conveyors, and chain drives.
LV motors
Low voltage motors across all industrial applications.
How this page is validated
Reviewed evidence from the 12 months ending 2026-05-01. The sample on Archimedes screws is small. Per our reporting rules, samples below 50 confirmed cases are reported case by case rather than as a single headline figure.
How cases enter the sample
- Each alert SAM4 raises is followed up against customer-confirmed outcomes
- Cases are scored independently: detected, missed, or false alert
- Operational insights (real deviations that are not developing faults) are tracked separately
- Twelve months ending 2026-05-01 on Archimedes screws produced 12 scored cases
What the validation report contains
- Case-level detail with signal trace and resolution
- Exclusion criteria and review rules
- Pathway-level breakdown (belt, gearbox, electrical, process)
- Available to qualified technical evaluators
See SAM4 monitoring Archimedes screws
A 30-minute demo shows SAM4 running on inlet screws like yours, with real belt detection data and real early warning from unmanned sites.